Какво е безчетков постоянен мотор, как се изгражда и работи
дефиниция
Двигател без четка се нарича постоянен мотор, токът в намотките на който се превключва от специално превключващо устройство - нарича се „драйвер“ или „инвертор“ и тези намотки са винаги разположени на статора. Превключвателят се състои от 6 транзистора, те доставят ток към определена намотка, в зависимост от положението на ротора.
В националната литература такива двигатели се наричат „клапан“ (тъй като полупроводниковите превключватели се наричат „клапани“) и има разделяне на такива електрически машини на два типа под формата на противодействащ EMF. В чуждестранната литература съществува такава разлика, една от тях се нарича аналогично на руската „BLDC“ (безчетково задвижване с постоянен ток или двигател), което буквално звучи като „безчетков мотор с постоянен ток“ в намотките им се появява трапецовиден ЕМП. Клапанните двигатели със синусоидален EMF се наричат PMSM (постоянна магнитна синхронна машина), което се превежда като "синхронен електродвигател с възбуждане от постоянни магнити".
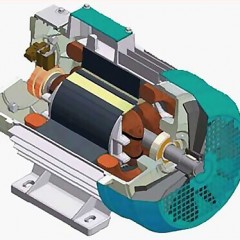
Устройството и принципът на работа
Колекторът в KDPT служи като възел за превключване на ток в намотките на арматурата. В безчетковия двигател с постоянен ток (BDT) тази роля се играе не от ламелни четки, а от комутатора на него чрез полупроводникови превключватели - транзистори. Транзисторите превключват намотките на статора, създавайки въртящо се магнитно поле, което взаимодейства с магнитното поле на ротора. И когато токът тече през проводник, който е в магнитно поле, той действа върху него Амперна сила, поради действието на тази сила, върху вала на електрическите машини се генерира въртящ момент. Принципът на работа на всеки електромотор се основава на това.
 и безчетковия мотор (вдясно)")
Сега нека разберем как работи безчетковият мотор. 3 намотки обикновено са разположени на статора BDPT, по аналогия с двигатели с променлив ток те често се наричат трифазни. Това отчасти е вярно: безчетковите двигатели се захранват от източник на постоянен ток (често от батерии), но контролерът се включва намотките последователно. Не е напълно вярно обаче да се твърди, че през намотките тече променлив ток. Крайната форма на намотката на захранващото напрежение се формира от правоъгълни импулси за управление на транзистора.
Трифазен двигател без четка може да бъде трижилен или четирижилен, където четвъртият проводник е кран от средната точка (ако намотките са свързани заедно звезден модел).

Намотките или, с прости думи, намотките от медна тел се вписват в зъбите на сърцевината на статора. В зависимост от дизайна и предназначението на задвижването, статорът може да има различен брой зъби. Има различни опции за разпределение на фазовите намотки по зъбите на ротора, което е илюстрирано от следната фигура.

Намотките на всеки от зъбите в рамките на една фаза могат да бъдат свързани последователно или паралелно, в зависимост от задачите, възложени на проектанта по отношение на мощността и момента на проектираното задвижване, а самите фазови намотки са свързани помежду си според модела на звезда или триъгълник, като асинхронни или синхронен трифазни двигатели с променлив ток.

В статора могат да се монтират сензори за положение на ротора. Често се използват сензори на Хол, те дават сигнал на контролера, когато са засегнати от магнитното поле на магнитите на ротора. Това е необходимо, за да може контролерът да „знае“ в какво положение е роторът и да захранва захранването към съответните намотки. Това е необходимо за повишаване на ефективността и стабилността на работата и накратко, за да се изтръгне цялата възможна мощност от двигателя. Сензорите обикновено инсталирани 3 броя. Но наличието на сензори усложнява устройството на безчетков мотор, те трябва да провеждат допълнителни проводници за захранващи и данни линии.

В BDTT се използват постоянни магнити, монтирани на ротора, за възбуждане, а статорът е котва. Спомнете си, че в колекторните машини е обратното (роторът е котва), а за възбуждане в CD се използват както постоянни магнити, така и електромагнити (намотки).
Магнитите са монтирани с редуващи се полюси и съответно броят им определя броя на двойките полюси. Но това не означава, че колко магнити, а след това толкова двойки полюси. Няколко магнита могат да образуват един полюс. Броят обороти в минута зависи от броя на полюсите, както е при индукционния двигател (и други). Тоест, от един контролер със същите настройки, безчетковите мотори с различен брой полюсни двойки ще се въртят с различна скорост.

Видове BDTT
Сега да видим какви са безчетковите двигатели с постоянен магнит. Те се класифицират по формата на противодействащия ЕМП, дизайна, както и по наличието на сензори за положение на ротора. И така, има два основни типа, които се различават под формата на контра-EMF, който се индуцира в намотките, когато роторът се върти:
- BLDC - в тях трапецовиден анти-ЕМП;
- PMSM - антиемфен синусоидален.
В идеалния случай те се нуждаят от различни източници на енергия (контролери), но на практика те са взаимозаменяеми. Но ако използвате контролер с правоъгълно или трапецовидно изходно напрежение с PMSM мотор, ще чуете характерни звуци, подобни на чукане по време на въртене.
А по дизайн безчетковите двигатели с постоянен ток са:
- С вътрешен ротор. Това е по-познато представяне на електродвигателя, когато статорът е тяло и валът, разположен в него, се върти. Често ги наричат английската дума "Inrunner". Тази опция обикновено се използва за високоскоростни електромотори.
- С външен ротор. Тук външната част на двигателя се върти с вал, фиксиран към него, в английски източници той се нарича „изпускател“. Тази схема на устройството се използва, когато имате нужда от висок момент.
Дизайнът се избира в зависимост от това защо е необходимо безчетков мотор в конкретно приложение.
 и outrunner (вдясно)")
Съвременната индустрия произвежда безчеткови двигатели със и без сензори за положение на ротора. Факт е, че има много начини за управление на BDTT, за някои от тях са необходими сензори за положение, други определят позициите от ЕМП в намотките, т.е.третите просто доставят захранване на необходимите фази и електрическият двигател независимо се синхронизира с такова захранване и влиза в режим на работа.
Основни характеристики на безчеткови двигатели с постоянен ток:
- Режим на работа - дълъг или къс.
- Максимално работно напрежение.
- Максимален работен ток.
- Максимална мощност.
- Максималните обороти често означават не обороти, а KV - r / v, тоест броят обороти на 1 волт от приложеното напрежение (без натоварване на вала). За да получите максималната скорост - умножете това число по максималното напрежение.
- Съпротивлението на намотката (колкото е по-малко, толкова по-висока е ефективността), обикновено възлиза на стотни и хилядни ома.
- Фазата на напредване на фазата (времето) е времето, след което токът в намотката достига своя максимум, това се дължи на законите на индуктивността и превключването (токът в индуктивността не може да се промени моментално.
Схема на свързване
Както бе споменато по-горе, за работата на безчетков мотор се нуждаете от специален контролер. В aliexpress можете да намерите както комплекти от двигателя и контролера, или отделно. Контролерът се нарича също мотор ESC или електрически регулатор на скоростта. Те се избират от силата на тока, даден на товара.
Обикновено свързването на електродвигателя с контролера е лесно и е разбираемо дори за манекени. Основното, което трябва да знаете, е, че за да промените посоката на въртене, трябва да промените връзката на всякакви две фази, всъщност както и в трифазни асинхронни или синхронни двигатели.

Мрежата има редица технически решения и схеми, както сложни, така и за манекени, които можете да видите по-долу.
В това видео авторът разказва как да се сприятели с моторите BC "Arduino".
И в това видео ще научите за различни начини за свързване към различни контролери и как можете да го направите сами. Авторът демонстрира това с пример за мотор от HDD и двойка мощни инстанции - inrunner и outrunner.
Между другото, ние прилагаме и диаграмата от видеото за повторение:

Където се използват безчеткови двигатели
Обхватът на такива електродвигатели е предсрочно широк. Използват се както за управление на малки механизми: в CD устройства, DVD устройства, твърди дискове, така и в мощни устройства: батерия и електроинструмент (с захранване от около 12 V), радиоуправляеми модели (например квадрокоптери), CNC машини за управление на работно тяло (обикновено двигатели с номинално напрежение 24V или 48V).
BDTT са широко използвани в електрическите превозни средства, почти всички съвременни моторни колела на електрически скутери, велосипеди, мотоциклети и автомобили са безчеткови двигатели. Между другото, номиналното напрежение на електродвигателите за транспорт се намира в широк диапазон, например, моторът на колелото на колелото често работи от 36V или 48V, с редки изключения и повече, а в колите, например, на Toyota Prius около 120V, и на Nissan Leaf - стига до 400, докато се зарежда от 220V мрежа (това се реализира с помощта на вградения конвертор).
Всъщност обхватът на безчетките електродвигатели е много обширен, отсъствието на колекторния възел позволява използването му на опасни места, както и на места с висока влажност, без опасения от късо съединение, дъга или пожар поради дефекти в четката. Поради високата си ефективност и добрите общи размери те намериха приложение в космическата индустрия.
Предимства и недостатъци
Безчетковите двигатели с постоянен ток, както и другите видове електрически машини, имат определени предимства и недостатъци.
Предимствата на BDTT са следните:
- Благодарение на възбуждането от мощни постоянни магнити (неодим, например), те са по-добри по въртящ момент и мощност и имат по-малки размери от индукционните мотори. Какво се използва от повечето производители на електрически превозни средства - от скутери до автомобили.
- Няма сглобяващ колектор на четките, който изисква редовна поддръжка.
- Когато използват висококачествен контролер, за разлика от същия CD, те не пречат на захранващата мрежа, което е особено важно при радиоуправляемите устройства и превозните средства с модерно електронно оборудване в бордовата мрежа.
- Ефективност повече от 80, по-често и 90%.
- Висока скорост на въртене, в някои случаи до 100 000 об / мин.
Но има значителен минус: безчетковият мотор без контролер е просто парче желязо с медна намотка. Няма да може да работи. Контролерите не са евтини и най-често трябва да се поръчват в онлайн магазини или с aliexpress. Поради това използването на BC двигатели в домашни модели и устройства не винаги е възможно.
Сега знаете какво е безчетков мотор с постоянен ток, как работи и къде се използва. Надяваме се нашата статия да ви помогне да решите всички проблеми!
Свързани материали:




В крайна сметка има хора, които не само знаят материала, но и са надарени от Бог със способността интелигентно, разбираемо и не скучно да го излагат!
Четох като готин детектив!
Много благодаря на автора за статията, за всеки успех и всичко най-добро в живота!
👍👍👍👍👍👍👍👍👍👍👍👍👍👍
Съгласен съм с всичко, с изключение на едно. На prius е редовен асинхронен 17 кВт при 380v батерия дава 288 константа. Е, тогава малко електроника и да тръгваме